
Return to USAD, main project page
Return to Pietro Colombo's personal page
The goal of this work is to carry out a USAD (Urban Shuttles Autonomously Driven) vehicle of a system that produced robust odometry. To achieve robust odometry, more heterogeneous sensors are used, as using only one technology would be unreliable. During the development of the work we added the covariance matrix to IMU messages using the information on the manual technician, the odometric messages presented the same problem that we solved by creating a matlab model that calculates the matrix covariance.
The node communicating with the IMUs and posting messages had both issues in the frequency of message publishing and the time indicated in the message was incorrect. Both issues have solved them. We also made 3D and printed media for IMU.
The image below represents the path we used to test 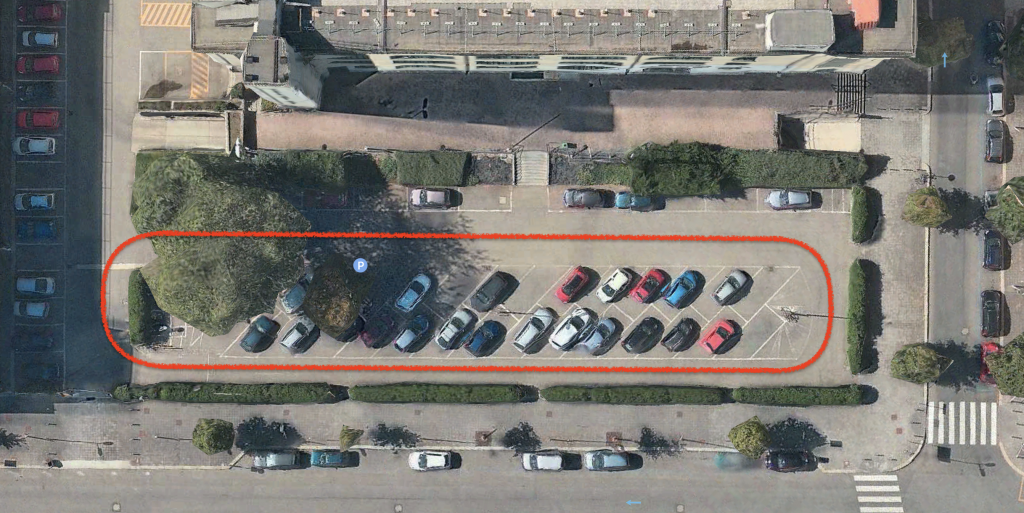
If we only use the odometry the closing error is more than 7 meters as we can see from the image below 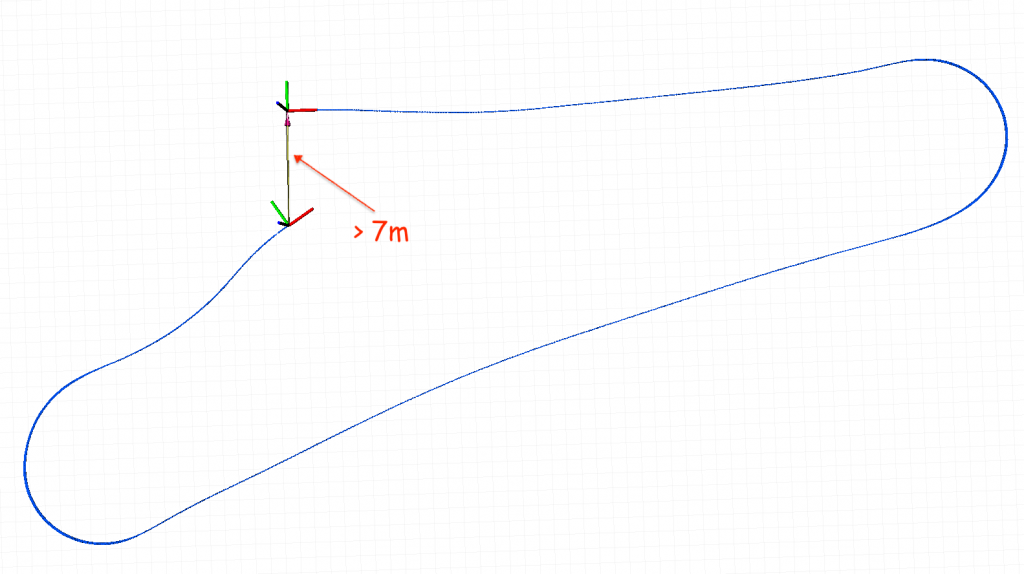
If we use odometry, 2 IMU, 2 GPS the result is significantly better as seen from the image below
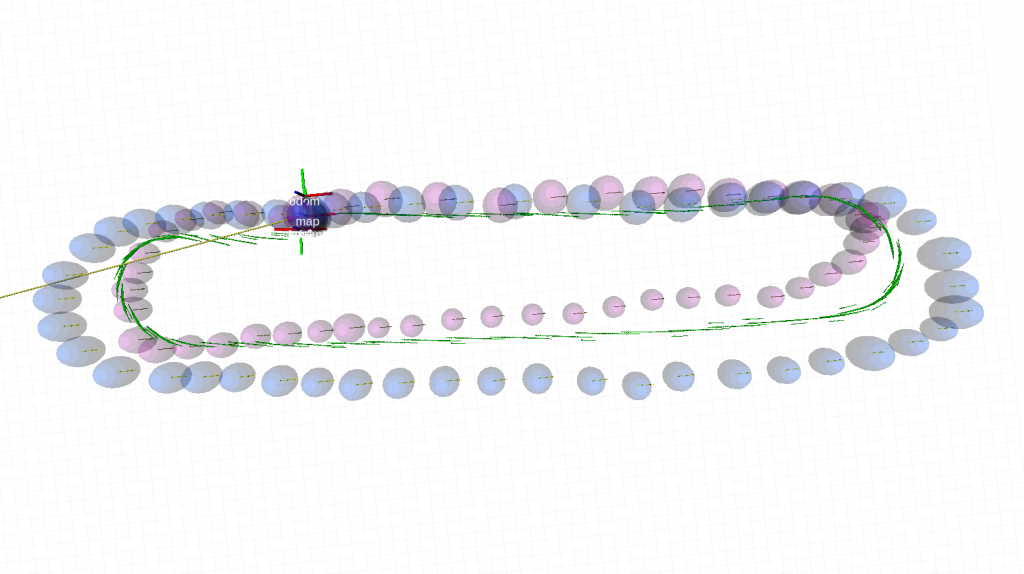
As you can see 2 GPS (blue circles and purple circles) of the same brand give different information, so it implies that using only GPS is not enough.