

Hi everyone, I'm Augusto and from 2017 to May 2019 I worked at IRALAB as a Postdoctoral Research Fellow.
At the moment, I'm with the Universidad de Alcala (Alcala de Henares, Spain), working with the INVETT Research Group.
Anyway, I still collaborate with the IRALAB group so feel free to contact me both using both the email addresses you can find hereafter ("Contacts").
For an updated version of my personal page, please visit https://trigal.github.io/
 orcid.org/0000-0001-6688-5081
orcid.org/0000-0001-6688-5081
Updates
- 24/June/2019: the paper CMRNet: Camera to LiDAR-Map Registration was accepted to be presented in the ITSC 2019 conference within the Special Session on Urban Localization I organized together with prof. Domenico G. Sorrenti, Ignacio Parra and Julius Kümmerle.
See you all in Auckland! - 21/May/2019: ICRA 2019 - Together with Daniele Cattaneo, I'll be in Montreal to present one of the last works on vehicle localization in urban settings. The work, is described here Visual Localization at Intersections with Digital Maps
- May/June 2019 - After more than 9 years, I'll move to Alcala de Henares for two years to join the INVETT research group lead by Prof. Miguel Angel Sotelo, as GET-COFUND Marie Curie Fellow.
- Together with prof. Domenico G. Sorrenti, Ignacio Parra and Julius Kümmerle I proposed and organized the IEEE ITSC 2018 Special Session on Urban Localization. Hope to see everyone in Auckland, New Zealand, 27-30 October 2019!
- 27th Oct 2018 - Together with Pietro Colombo, I made a short presentation about ROS (in italian) and the history of autonomous driving cars at the Linux Day 2018 - Milan edition organized at the University of Milano Bicocca.
- 27th March 2017, hurray! I've just finished the XXVIII PhD Cycle in Computer Science with my thesis "Matching heterogeneous sensing pipelines to digital maps for ego-vehicle localization". You can download the slides of my final presentation in here ballardini-final-presentation-public.pdf (2442 downloads ) and the full thesis download
- Update, back to Italy
- From May 2015 to December 2015 I was a visiting scholar at the University of Alcalá de Henares (UAH ISISLab , now INVETT) under the supervision of prof. Miguel Ángel Sotelo.
Contacts
Università degli Studi di Milano - Bicocca Dipartimento di Informatica, Sistemistica e Comunicazione Building U14 viale Sarca 336, 20126 Milano, Italy; Informatics and Robotics for Automation Lab (IRALab) Location: Room 1020 Phone: +39 02 6448 7823 Email: augusto [dot] ballardini at unimib dot it
Universidad de Alcalá, Alcalá de Henares (Spain) Departamento de Automática - Escuela Politécnica. Ctra. Madrid-Barcelona, Km.33,600 28871 Alcalá de Henares (Madrid) Location: Dept. Automatica, Pasillo III - E335 Email: augusto [dot] ballardini at uah [dot] es
Research Interests
- Outdoor autonomous navigation in urban environment (old website page)
- 3D World Modeling and Robot Localization (old website page)
- The Road Layout Estimation Project
Publications
- D.Cattaneo M.Vaghi A.L.Ballardini S.Fontana D.G.Sorrenti W.Burgard, CMRNet: Camera to LiDAR-Map Registration accepted for presentation at IEEE ITSC 2019. Abstract: In this paper we present CMRNet, a realtime approach based on a Convolutional Neural Network (CNN) to localize an RGB image of a scene in a map built from LiDAR data. Our network is not trained on the working area, i.e., CMRNet does not learn the map. Instead it learns to match an image to the map. We validate our approach on the KITTI dataset, processing each frame independently without any tracking procedure. CMRNet achieves 0.26m and 1.05deg median localization accuracy on the sequence 00 of the odometry dataset, starting from a rough pose estimate displaced up to 3.5m and 17deg. To the best of our knowledge this is the first CNN-based approach that learns to match images from a monocular camera to a given, preexisting 3D LiDAR-map.
- A.L.Ballardini D.Cattaneo D.G.Sorrent, Visual Localization at Intersections with Digital Maps, presented a ICRA 2019 Montreal. Abstract: This paper deals with the task of ego-vehicle localization at intersections, a significant task in autonomous road driving. We propose an online vision-based method that can hence be applied if the intersection is visible. It relies on stereo images and on a coarse street-level pose estimate, used to retrieve intersection data from a digital map service. Pixel-level semantic segmentation, and 3D reconstruction from state-of-the art Deep Neural Networks are coupled with an intersection model; this allows good positioning accuracy with respect to the state-of-the-art in this task. To demonstrate the effectiveness of the method and make it possible to compare it with other methods, an extensive activity has been conducted in order to set up a dataset of approaches to an intersection, which has then been used to benchmark the proposed method. The dataset is made available to the community, and it currently includes more than forty intersection approaches, from KITTI. Another important contribution of the paper is the definition of criteria for the comparison of different methods, on recorded datasets. The proposed method achieves nearly sub-meter accuracy in difficult real conditions.
- A.L.Ballardini D.Cattaneo D.G.Sorrenti (Università degli Studi di Milano-Bicocca) and R.Izquierdo, I.Parra, M.A. Sotelo (Universidad de Alcalá) - Ego-Lane Estimation by Modeling Lanes and Sensor Failures Presented at ITSC 2017
Abstract - In this paper we present a probabilistic lane-localization algorithm for highway-like scenarios designed to increase the accuracy of the vehicle localization estimate. The contribution relies on a Hidden Markov Model (HMM) with a transient failure model. The idea behind the proposed approach is to exploit the availability of OpenStreetMap road properties in order to reduce the localization uncertainties that would result from relying only on a noisy line detector, by leveraging consecutive, possibly incomplete, observations. The algorithm effectiveness is proven by employing a line detection algorithm and showing we could achieve a much more usable, i.e., stable and reliable, lane-localization over more than 100Km of highway scenarios, recorded both in Italy and Spain. Moreover, as we could not find a suitable dataset for a quantitative comparison of our results with other approaches, we collected datasets and manually annotated the Ground Truth about the vehicle ego-lane. Such datasets are made publicly available for usage from the scientific community.
Download presentation slides from here - Augusto Luis Ballardini, Daniele Cattaneo, Simone Fontana, Domenico Giorgio Sorrenti - An Online Probabilistic Road Intersection Detector - Presented ad ICRA 2017 Conference [link]
In this paper we propose a probabilistic approach for detecting and classifying urban road intersections from a moving vehicle. The approach is based on images from an onboard stereo rig; it relies on the detection of the road ground plane on one side, and on a pixel-level classification of the road on the other. The two processing pipelines are then integrated and the parameters of the road components, i.e., the intersection geometry, are inferred. As opposed to other state-of-the-art offline methods, which require processing of the whole video sequence, our approach integrates the image data by means of an online procedure. The experiments have been performed on well-known KITTI datasets, allowing for future comparisons. - Augusto Luis Ballardini, Daniele Cattaneo, Simone Fontana, Domenico Giorgio Sorrenti - Leveraging the OSM Building Data to Enhance Localization of an Urban Vehicle, IEEE ITSC 2016 Conference [link]. In this paper we present a technique that takes advantage of detected building fac ̧ades and OpenStreetMaps data to im- prove the localization of an autonomous vehicle driving in a urban scenario. The proposed approach leverages images from a stereo rig mounted on the vehicle to produce a mathematical representation of the buildings’ facades within the field of view. This representation is matched against the outlines of the surrounding buildings as they are available on OpenStreetMaps. The information is then fed into our probabilistic framework, called Road Layout Estimation, in order to produce an accurate lane-level localization of the vehicle. The experiments conducted on the well-known KITTI datasets prove the effectiveness of our approach
- Simone Fontana, Lorenzo Ferretti, Augusto Luis Ballardini, Axel Furlan and Domenico Giorgio Sorrenti - An Indoor Localization System for Telehomecare Applications on IEEE Transactions on Systems, Man, and Cybernetics: Systems - In this paper, we present a novel probabilistic technique, based on the Bayes filter, able to estimate the user location, even with unreliable sensor data coming only from fixed sensors in the monitored environment. Our approach has been extensively tested in a home-like environment, as well as in a real home, and achieves very good results. We present results on two datasets, representative of real life conditions, collected during the testing phase. We detect the patient location with subroom accuracy, an improvement over the state of the art for localization using only environmental sensors. The main drawback is that it is only suitable for applications where a single person is present in the environment, like as with other approaches that do not use any mobile device. For this reason, we introduced the "telehomecare" term, therefore differentiating from generic telemedicine applications, where many people can be in the same environment at the same time.
- Augusto Luis Ballardini, Simone Fontana, Axel Furlan, Dario Limongi, Domenico Giorgio Sorrenti - A framework for outdoor urban environment estimation, IEEE 18th International Conference on Intelligent Transportation Systems, ITSC2015, in ITSC2015 proceedings.
Abstract: In this paper we present a general framework for urban road layout estimation, altogether with a specific application to the vehicle localization problem. The localization is performed by synergically exploiting data from different sensors, as well as map-matching with OpenStreetMap cartographic maps. The effectiveness is proven by achieving real-time computation with state-of-the-art results on a set of ten not trivial runs from the KITTI dataset, including both urban/residential and highway/road scenarios. Although this paper represents a first step implementation towards a more general urban scene understanding framework, here we prove its flexibility of application to different intelligent vehicles applications.

- Augusto Luis Ballardini, Simone Fontana, Axel Furlan, Domenico G. Sorrenti - ira_laser_tools: a ROS LaserScan manipulation toolbox http://arxiv.org/abs/1411.1086 or here
Abstract: Laser scanners are sensors of widespread use in robotic applications. Under the Robot Operating System (ROS) the information generated by laser scanners can be conveyed by either LaserScan messages or in the form of PointClouds. Many publicly available algorithms (mapping, localization, navigation, etc.) rely on LaserScan messages, yet a tool for handling multiple lasers, merging their measurements, or to generate generic LaserScan messages from PointClouds, is not available. This report describes two tools, in the form of ROS nodes, which we release as open source under the BSD license, which allow to either merge multiple single-plane laser scans or to generate virtual laser scans from a point cloud. A short tutorial, along with the main advantages and limitations of these tools are presented. - A. L. Ballardini, A. Furlan, A. Galbiati, M. Matteucci, F. Sacchi, D. G. Sorrenti An effective 6DoF motion model for 3D-6DoF Monte Carlo Localization 4th Workshop on Planning, Perception and Navigation for Intelligent Vehicles, IROS, 2012 PDF available
.
Abstract: This paper deals with the probabilistic 6DoF motion model of a wheeled road vehicle. It allows to correctly model the error introduced by dead reckoning. Furthermore, to stress the importance of an appropriate motion model, i.e., that different models are not equally good, we show that another model, which was previously developed, does not allow a correct representation of the uncertainty, therefore misguiding 3D-6DoF Monte Carlo Localization. We also present some field experiments to demonstrate that our model allow a consistent determination of the 6DoF vehicle pose - A. L. Ballardini, A. Furlan, A. Galbiati, M. Matteucci, F. Sacchi, D. G. Sorrenti - 6DoF Monte Carlo Localization in a 3D world with Laser Range Finders. This is a research report of my master's thesis, written for the DISCO Dept.
[Other link from Unimib]
Abstract: In mobile robotics, localization plays a key role in every task assigned to a robot. This report describes the probabilistic module we developed to solve the localization problem in our autonomous driving vehicle. Our method uses a complete 6DoF approach within a 3D motion model, in order to correctly integrate the error caused by dead reckoning. Furthermore, the description of the environment is a 3D voxel representation. We base on particle filtering, in the localization process. An ad-hoc simulation environment has been developed, for testing the effectiveness of the motion model. Finally, we performed some field experiments, to demonstrate that our approach consistently locates the 6DoF position of the vehicle along the driven path on the test site.
Public Datasets
![]()
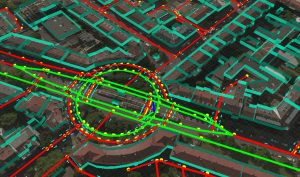
Intersection Detector & Ground Truth
The following datasets are related to paper An Online Probabilistic Road Intersection Detector presented in the IEEE ICRA 2017 Conference [link]
Projects and Presentations
- Autonomous Road Vehicles History and Current Developments - a short presentation after the V-Charge Summer School. Slides available in PDF format and Powerpoint with videos available upon request.
- Simulation for the Computational approaches to Physical and Virtual Crowd Phenomena, developed as a final exam of the Computational approaches to Physical and Virtual Crowd Phenomena.
- PSO Clustering Algorithm, based on "Data clustering using particle swarm optimization" by DW Der Merwe and AP Engelbrecht, developed as a final exam of the Clustering Analysis Course. Download the code here and presentation
.
After I reveiced many emails, I published a short tutorial about the implementation of the software. The report is available here: - USAD, Urban Shuttles Autonomously Driven [link]
- 3D 6DoF self-localization and navigation
- Obstacle detection and avoidance
- KITTI Player - A ROS player for the KITTI dataset [link]
Courses and Schools attended during the PhD Years
- Parallel Computing Using MPI and OpenMP - Cineca 17-25 June 2013
- 1st Summer School on Critical Embedded Systems, 2-11 July 2013, Toulouse - France [link]
- 4th PAVIS School on Computer Vision, Pattern Recognition, and Image Processing, September 18-20, 2013 - Sestri Levante (GE), Italy
- V-Charge Summer School on Perception and Planning for Autonomous Driving - July 7-10 2014, ETH Zurich, Switzerland
- Computational approaches to Physical and Virtual Crowd Phenomena - DISCO PhD Course [link]
- Clustering Analysis - DISCO PhD Course
- Advanced Techniques for Combinatorial Algorithms - DISCO PhD Course
- Paradigms and Approaches to Computer Security - DISCO PhD Course [link]
Teaching assistance
- Computer Architecture (Architettura modulo Elaboratori)
- Robotics:
- Robot motion (Probabilistic Robotics Ch.6): 3DoF and 6DoF odometry model, sampling algorithm, beam model
- Robot Localization, Monte Carlo (Probabilistic Robotics, Ch.8): MCL, Augmented MCL, KLD-Sampling
- Camera Calibration DLT - Lab Practice
- Camera Calibration using Matlab Toolbox and OpenCV / ROS Tools - Mono & Stereo configuration - Lab Practice

Alumni
During the last few years 2012-2017 I have had the opportunity to supervise the works of:
MSc
Daniele Cattaneo - A probabilistic intersection detector for the Road Layout Estimation Framework
Sergio Cattaneo - Leveraging the OSM building data in the Road Layout Estimation Framework
Dario Limongi - Road Layout Estimation - A probabilistic framework for autonomous driving Cars
Francesco Sacchi - 3D slam for autonomous vehicle
BSc
Federico Lodovici - Façade segmentation from 3D PointClouds for vehicle localization using Openstreetmap
Davide Rezzoli - Evaluation and experimentation of mapping and localization systems in the university campus
Mattia Busnelli - Construction of the physical support structure for a Velodyne 16P
and testing of its functionalities
Riccardo Capra - A pedestrian detection module for the USAD vehicle
Carlo Radice - Estensione del navigation stack di ROS per la gestione degli ostacoli dinamici (An extension of the ROS Navigation Stack for the management of moving obstacles)
Leonardo Antonio de Lisi - Integration in the navigation stack of the USAD vehicle of a vision-based tool for lane detection
Costantino Carta - Curb detection in urban environments using LiDAR pointclouds
Nicolò Vecchio - Evaluation / Experimentation of mapping and localization systems in the university campus
Riccardo Candrina - Implementation of a global planner operating with OSM for the USAD vehicle
Fabio Nava - Implementation of a motion planning algorithm for the Ackermann kinematics USAD vehicle
Pietro Colombo - Robust odometry for the USAD vehicle
Matteo Vaghi - USAD GUI: progettazione ed implementazione di una interfaccia grafica per veicolo a guida autonoma
Alessandro Pagani - Trajectory Recorder and Player for Mobile Robots
Fabrizio Bianchini - A robotic mapping platform based on laser scanner
Alfredo De Santis - 3D Mapping with laser scanners
Daniele Fiorenti - 3D Mapping Ground Truth
Elio Salanitri - A laser device and its calibration for the 3D Mapping Ground Truth project
Old Projects
Electronics Related Projects (developed during the master degree) - SPI Accelerometers